
Garras laparoscópicas
Las pinzas laparoscópicas intestinales, también conocidas como pinzas intestinales, son una forma de instrumento de agarre diseñado para manipular con seguridad el tejido abdominal delicado durante procedimientos laparoscópicos. Una de sus funciones principales es facilitar el acceso adecuado al sitio quirúrgico manteniendo el tejido intestinal libre del campo operatorio.
La historia del desarrollo de la pinza laparoscópica
Existe evidencia de que las versiones primitivas de herramientas quirúrgicas como alcances, trocares y escalpelos se usaban antes del descubrimiento del metal, con ejemplos de instrumentos formados a partir de piedra, madera, juncos, fragmentos de huesos y otros materiales orgánicos registrados. Sin embargo, se cree que los primeros instrumentos con bisagras de los que descienden las pinzas laparoscópicas modernas no se desarrollaron hasta después del descubrimiento del cobre y el bronce, ya que los materiales orgánicos no habrían sido adecuados. Uno de los primeros ejemplos de pinzas quirúrgicas, que consta de un par de miembros de bronce unidas entre sí por una correa de cuero para formar un pivote, se encontró en Grecia, de fecha circa 1450-1400 BC. La evidencia arqueológica de las ruinas de Pompeya sugiere que los cirujanos romanos usaban instrumentos de bronce pivotados en el 79 dC, y para el momento del cirujano y enciclopedista argelino Albucasis (936-1013), tales herramientas se habían convertido en una serie de tipos diferentes diseñados para aplicaciones específicas . Los instrumentos modernos se fabrican típicamente con acero inoxidable de calidad quirúrgica y también pueden incorporar otros materiales, como titanio, carburo de tungsteno y diversos plásticos.
¿En qué se diferencian los agarradores laparoscópicos de los instrumentos abiertos?
Las pinzas laparoscópicas intestinales son una de una gama de herramientas laparoscópicas estandarizadas que difieren de sus contrapartes quirúrgicas convencionales en que tienen un eje o aguja extendida para poder maniobrar a través de incisiones que generalmente no superan los 5 mm durante los procedimientos mínimamente invasivos.
Dos juegos de instrumentos diferentes para cirugía

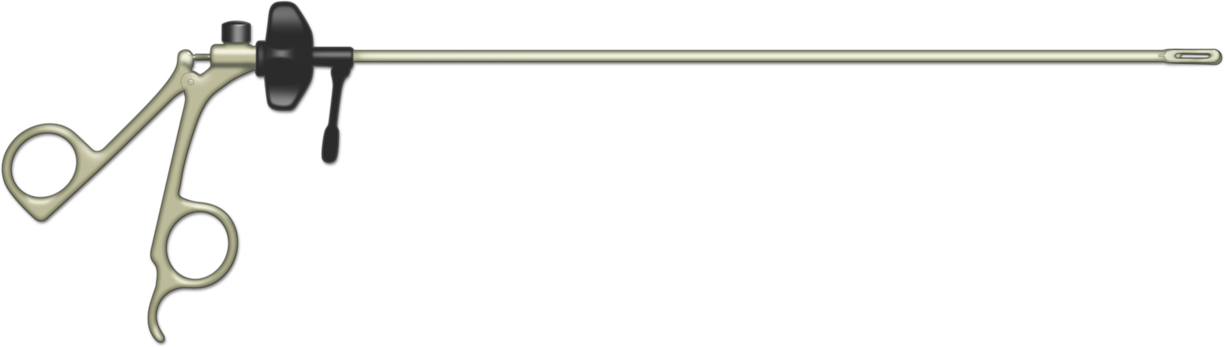
Los instrumentos están disponibles con varios factores de forma y pueden ser reutilizables o desechables. Normalmente comprende una manija, un eje aislado y una inserción que forma la punta, algunas versiones también incluyen postes de cauterización para la unión a cables electroquirúrgicos monopolares. Dichos dispositivos están diseñados con precisión, pero contienen pocas partes móviles, ya que están diseñados para su uso dentro de espacios muy restringidos alrededor de delicados órganos internos. Se encuentran disponibles modelos con diámetros dentro del rango de 1.8 mm a 12 mm, pero la mayoría de los instrumentos están diseñados para usar en aberturas de 5 mm o 10 mm. Longitudes de aproximadamente 30 a 35 cm son típicas para muchos procedimientos de adultos, pero pueden requerirse instrumentos más largos o más cortos en determinadas circunstancias.
¿Cuál es el diseño de una pinza laparoscópica típica?
La superficie externa del eje del instrumento está recubierta con una capa eléctricamente aislante de plástico o silicona, para aliviar el riesgo de quemaduras eléctricas debido a fallas de aislamiento o acoplamiento capacitivo durante la aplicación de energía electroquirúrgica. El mango del instrumento puede colocarse en línea con el eje, y también hay disponibles tipos articulados o flexibles, pero lo más común es que esté ubicado en una posición perpendicular fija con respecto al eje.
Diseño de punta diferente en instrumentos de agarre

Las pinzas de agarre de un solo uso se suministran generalmente con un mango anular, con un lazo superior para el pulgar y un lazo inferior para uno o más dedos. Los mangos de este tipo pueden ser más adecuados para aplicaciones donde la precisión ofrecida por un agarre de pinza es un factor importante, mientras que los mangos que permiten que se use la mayor fuerza de un agarre de palma pueden ser más apropiados para tareas que requieren potencia sobre precisión. Sin embargo, es una cuestión de preferencia personal, y los instrumentos reutilizables suelen ser modulares, de modo que el cirujano puede usar su tipo de mango preferido con una variedad de diferentes puntas según sea necesario. Además de los tiradores anulares, existen otros diseños disponibles, incluidos mangos de mango accionados por resorte con una operación tipo pistola, así como una gama de mangos multifuncionales.
¿Cuáles son algunas características especiales de diseño?
En situaciones donde la posición del tejido agarrado debe mantenerse durante períodos prolongados, la capacidad de bloquear las mandíbulas del instrumento puede ayudar a reducir la fatiga de la mano, por lo tanto, la mayoría de las pinzas están equipadas con algún tipo de mecanismo de bloqueo, generalmente operado mediante una palanca ubicada en el mango del instrumento. Los mecanismos de trinquete, que permiten bloquear las mandíbulas en una variedad de posiciones diferentes, según la cantidad de presión requerida, son los más comunes, aunque hay otros diseños disponibles. Algunos diseños de instrumentos permiten una rotación de 360 ° de la punta de agarre a través de una rueda o perilla ubicada en el mango. Esto generalmente se coloca en la parte superior del instrumento donde el mango se une al eje, de modo que puede manipularse con el pulgar. También se puede incorporar un puerto de descarga para una limpieza accesible del orificio interno del eje en la parte superior del mango.
Consideraciones para manejar el tejido durante la cirugía laparoscópica
El tejido intestinal se considera uno de los más delicados en el cuerpo humano, por lo que es esencial que la punta de agarre sea capaz de ofrecer un agarre seguro y seguro, sin ejercer una presión excesiva. Hay varios tipos de mandíbulas disponibles, que incluyen recto o abocinado, traumático o atraumático, de acción simple o doble, y fenestrado o sólido. Las pinzas intestinales siempre deben ser de diseño atraumático, es decir, con extremos romos en lugar de puntiagudos, diseñados para ejercer un agarre firme y suave sobre el tejido intestinal. Los tipos de acción simple, con una mandíbula fija y una móvil, pueden ofrecer una mayor presión que las mandíbulas de doble acción, pero ofrecen una abertura más pequeña para agarrar el tejido. Los diseños sin penetración tienen mandíbulas sólidas, que dependen de la fricción para mantener el tejido en su lugar. Los diseños fenestrados incorporan un área o ventana abierta en una o ambas mandíbulas, haciéndolas más livianas, y teóricamente ofrecen un agarre más seguro que la fricción sola al encerrar una porción de tejido dentro de la ventana. En ambos casos, las mandíbulas más grandes ofrecen una mayor fricción y, por lo tanto, un mejor agarre. Las superficies internas de las mandíbulas pueden perfilarse con ondas, dientes, hemisferios protuberantes o nervaduras con dientes cruzados, para mejorar aún más las características de agarre. La nervadura dentado cruzado ofrece la ventaja de trabajar en una variedad de planos, mientras que un perfil ondulado es efectivo solo en el plano perpendicular a la dirección de las olas.
¿Cómo pueden las pinzas laparoscópicas causar daño?
Empuñar las pinzas del intestino requiere práctica y habilidad porque las puntas de las pinzas son pequeñas y la presión en las puntas se magnifica; demasiada presión puede provocar daños en los tejidos y una presión muy baja puede hacer que el tejido se salga de su agarre. Las técnicas mínimamente invasivas pueden privar a los cirujanos de la retroalimentación táctil, la percepción de la profundidad y la coordinación ojo-mano disponibles durante los procedimientos abiertos, lo que hace mucho más difícil juzgar cuánta fuerza aplicar.
Los sujetadores robóticos carecen de retroalimentación táctil

Esto es aún más un problema cuando se utilizan graspers en cirugía robótica, o durante el entrenamiento laparoscópico de realidad virtual. Un buen mecanismo de retroalimentación de fuerza es por lo tanto esencial. En procedimientos manuales, esto puede tomar la forma de una disposición mecánica de cables y poleas tensados que se extienden entre las mordazas del instrumento y el mango. La realidad virtual o los sistemas robóticos pueden incorporar tecnología háptica, donde los sensores de fuerza integrados en la punta del instrumento se pueden utilizar para proporcionar al cirujano retroalimentación táctil a través de varios medios incluyendo almohadillas vibratorias ubicadas en el mango o un agarre del cilindro que gira para indicar que hay más presión es requerido.
Natural Orifice Surgery Limited por una plataforma estable