
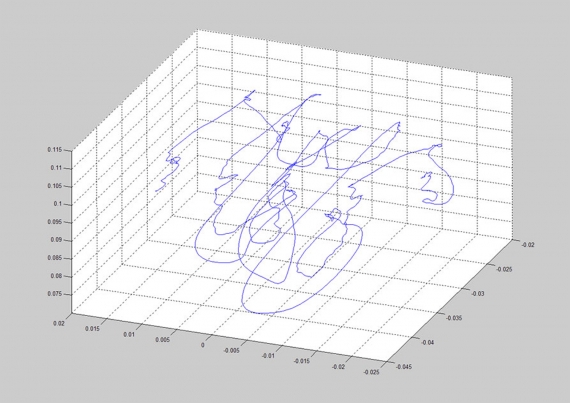
Flight path data from surgical movements are recorded from the da Vinci Robot API. This series demonstrates the difficulty with looking at a complex motion like knot-tying. Although geometric sequences are amenable to simple calculations, complex movements require machine learning algorithms.